
Ich hab sowas vor einer Weile auch mal mit dem MPU-6050 angefangen, dann aber aus Zeitmangel liegen lassen.
Ich hatte ein 128x64er Grafikdisplay auf dem ich eine Libelle dargestellt habe.
Hat auf dem Breadboard sogar funktioniert, aber als ich das Ganze dann in ein Gehäuse basteln wollte war grad mal wieder ein anderes Projekt wichtiger.
Viele Grüße
Robert
Kofferneigung im Fahrerhaus anzeigen
Moderator: Moderatoren
Re: Kofferneigung im Fahrerhaus anzeigen
Hier gibt es etwas fertiges mit Bluetooth und App
https://www.wit-motion.com/6-axis/witmo ... h-2-0.html
https://www.wit-motion.com/6-axis/witmo ... h-2-0.html

Re: Kofferneigung im Fahrerhaus anzeigen
so, hier nochmal die "fast" bauanleitung, für denjenigen der sich sowas selbst basteln will:
Einkaufsliste:
Arduno UNO (oder ein clon)
1602 display shield
MP-6050 Sensor
Kabel, je nach bedarf. Ich hab das ganze mit RJ-12 buchsen und 10m kabel verlegt.
Werkzeug:
-Lötkolben
-Multimeter
-PC mit Arduino IDE (und den Libraries für`s Shield installiert)
Anleitung:
-Stromversorgung für den Arduino beschreibe ich nicht, das ist bei jedem anders. Er akzeptiert alles zwischen 6 und 20V. Wer also 12V irgendwo rumliegen hat, kann das wunderbar verwenden.
-Das Display shield auf den Arduino aufsetzen
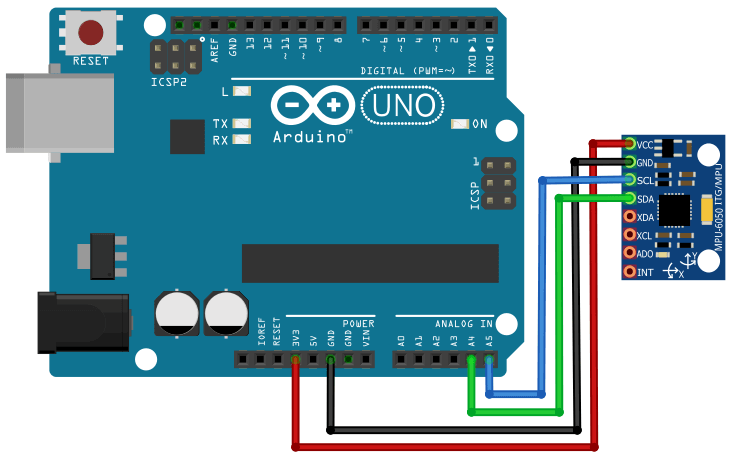
-Den Sensor mit dem Arduino verkabeln! Achtung: Durch das DisplayShield sind die origina-pins des arduino nichtmehr zu erreichen. Diese werden aber ans Shield durchgereicht, können also bequem am Shield angelötet werden
-Dann den Arduino mit dem PC verbinden und den code compilieren und hochladen
-Beim starten des scripts wird im Terminal des PC´s die Fehlerwerte des sensors ausgegeben. Diese sind in das script an markierter position einzugragen (GyroErrorX, GyroErrorY, GyroErrorZ, AccErrorX und AccErrorY)
Verkabelung:
Funktion:
Der Arduino zeigt die Neigung der PITCH achse im Display an. Mit drücken der "up" taste kann das ergebnis auch "genullt" werden. Hier kann jeder nach seinem einbau auch selbst einen fixen offset-wert eintragen! Das liegt an euch....
Viel Spaß
Code
Einkaufsliste:
Arduno UNO (oder ein clon)
1602 display shield
MP-6050 Sensor
Kabel, je nach bedarf. Ich hab das ganze mit RJ-12 buchsen und 10m kabel verlegt.
Werkzeug:
-Lötkolben
-Multimeter
-PC mit Arduino IDE (und den Libraries für`s Shield installiert)
Anleitung:
-Stromversorgung für den Arduino beschreibe ich nicht, das ist bei jedem anders. Er akzeptiert alles zwischen 6 und 20V. Wer also 12V irgendwo rumliegen hat, kann das wunderbar verwenden.
-Das Display shield auf den Arduino aufsetzen
-Den Sensor mit dem Arduino verkabeln! Achtung: Durch das DisplayShield sind die origina-pins des arduino nichtmehr zu erreichen. Diese werden aber ans Shield durchgereicht, können also bequem am Shield angelötet werden
-Dann den Arduino mit dem PC verbinden und den code compilieren und hochladen
-Beim starten des scripts wird im Terminal des PC´s die Fehlerwerte des sensors ausgegeben. Diese sind in das script an markierter position einzugragen (GyroErrorX, GyroErrorY, GyroErrorZ, AccErrorX und AccErrorY)
Verkabelung:
Funktion:
Der Arduino zeigt die Neigung der PITCH achse im Display an. Mit drücken der "up" taste kann das ergebnis auch "genullt" werden. Hier kann jeder nach seinem einbau auch selbst einen fixen offset-wert eintragen! Das liegt an euch....
Viel Spaß
Code
Code: Alles auswählen
#include <Wire.h>
#include <LiquidCrystal.h>
const int MPU = 0x68; // MPU6050 I2C address
float AccX, AccY, AccZ;
float GyroX, GyroY, GyroZ;
float accAngleX, accAngleY, gyroAngleX, gyroAngleY, gyroAngleZ;
float roll, pitch, yaw;
float AccErrorX, AccErrorY, GyroErrorX, GyroErrorY, GyroErrorZ;
float elapsedTime, currentTime, previousTime;
int c = 0;
const int rs = 8, en = 9, d4 = 4, d5 = 5, d6 = 6, d7 = 7;
LiquidCrystal lcd(rs, en, d4, d5, d6, d7);
int button = 0;
float angleoffset = 0;
int rest = 0;
byte p2[8] = {
0b10000,
0b10000,
0b10000,
0b10000,
0b10000,
0b10000,
0b10000,
0b10000
};
byte p4[8] = {
0b11000,
0b11000,
0b11000,
0b11000,
0b11000,
0b11000,
0b11000,
0b11000
};
byte p6[8] = {
0b11100,
0b11100,
0b11100,
0b11100,
0b11100,
0b11100,
0b11100,
0b11100
};
byte p8[8] = {
0b11110,
0b11110,
0b11110,
0b11110,
0b11110,
0b11110,
0b11110,
0b11110
};
byte p10[8] = {
0b11111,
0b11111,
0b11111,
0b11111,
0b11111,
0b11111,
0b11111,
0b11111
};
byte n2[8] = {
0b00001,
0b00001,
0b00001,
0b00001,
0b00001,
0b00001,
0b00001,
0b00001
};
byte n4[8] = {
0b00011,
0b00011,
0b00011,
0b00011,
0b00011,
0b00011,
0b00011,
0b00011
};
byte n6[8] = {
0b00111,
0b00111,
0b00111,
0b00111,
0b00111,
0b00111,
0b00111,
0b00111
};
byte n8[8] = {
0b01111,
0b01111,
0b01111,
0b01111,
0b01111,
0b01111,
0b01111,
0b01111
};
void setup() {
Serial.begin(115200);
Wire.begin(); // Initialize comunication
Wire.beginTransmission(MPU); // Start communication with MPU6050 // MPU=0x68
Wire.write(0x6B); // Talk to the register 6B
Wire.write(0x00); // Make reset - place a 0 into the 6B register
Wire.endTransmission(true); //end the transmission
// Call this function if you need to get the IMU error values for your module
calculate_IMU_error();
lcd.createChar(3, p10);
delay(20);
lcd.begin(16, 2);
lcd.clear();
}
void loop() {
button = analogRead(A0);
get_angle();
pitch = pitch - angleoffset;
draw_angles2();
// Print the values on the serial monitor
/*
Serial.print(roll);
Serial.print("/");
Serial.print(pitch);
Serial.print("/");
Serial.println(yaw);
*/
Serial.println(button);
if (button == 639) {
get_angle();
angleoffset = pitch;
}
delay(200);
}
void draw_angles2() {
lcd.clear();
rest = 10 * (pitch - int(pitch));
if (rest <= -8) {
lcd.createChar(4, n8);
}
else if (rest <= -6) {
lcd.createChar(4, n6);
}
else if (rest <= -4) {
lcd.createChar(4, n4);
}
else if (rest <= -2) {
lcd.createChar(4, n2); //n2
}
else if (rest <= 2) {
lcd.createChar(4, p2);
}
else if (rest <= 4) {
lcd.createChar(4, p4);
}
else if (rest <= 6) {
lcd.createChar(4, p6);
}
else if (rest <= 8) {
lcd.createChar(4, p8);
}
//delay(50);
if (pitch < 0) {
if (rest <= -2) {
lcd.setCursor(7 + int(pitch), 0);
lcd.write(4);
}
if (pitch < -1) {
for (int i = 8 + int(pitch); i <= 7; i++) {
lcd.setCursor(i, 0);
lcd.write(3);
}
}
}
else { //pitch >0
if (rest >= 2) {
lcd.setCursor(8 + int(pitch), 0);
lcd.write(4);
}
if (pitch > 1) {
for (int i = 8; i <= 7 + int(pitch); i++) {
lcd.setCursor(i, 0
lcd.write(3);
}
}
}
lcd.setCursor(0, 1);
lcd.print("Angle: ");
// lcd.print(rest);
if (pitch < 0) {
lcd.setCursor(7, 1);
}
else {
lcd.setCursor(8, 1);
}
lcd.print(0.1 * int(pitch * 10));
//lcd.print(pitch);
}
void draw_angles() {
lcd.clear();
// lcd.setCursor(0, 0);
if (pitch < 0) {
for (int i = 7 + int(pitch * 2); i <= 7; i++) {
lcd.setCursor(i, 0);
lcd.print("#");
}
}
else { //pitch >0
for (int i = 7; i <= 7 + int(pitch * 2); i++) {
lcd.setCursor(i, 0);
lcd.print("#");
}
}
lcd.setCursor(0, 1);
lcd.print("Pitch: ");
if (pitch < 0) {
lcd.setCursor(7, 1);
}
else {
lcd.setCursor(8, 1);
}
lcd.print(0.1 * int(pitch * 10));
//lcd.print(pitch);
}
void print_angles() {
lcd.clear();
lcd.setCursor(0, 0);
lcd.print("Roll: ");
lcd.setCursor(8, 0);
lcd.print(roll);
lcd.setCursor(0, 1);
lcd.print("Pitch: ");
lcd.setCursor(8, 1);
lcd.print(pitch);
}
void get_angle() {
// === Read acceleromter data === //
Wire.beginTransmission(MPU);
Wire.write(0x3B); // Start with register 0x3B (ACCEL_XOUT_H)
Wire.endTransmission(false);
Wire.requestFrom(MPU, 6, true); // Read 6 registers total, each axis value is stored in 2 registers
//For a range of +-2g, we need to divide the raw values by 16384, according to the datasheet
AccX = (Wire.read() << 8 | Wire.read()) / 16384.0; // X-axis value
AccY = (Wire.read() << 8 | Wire.read()) / 16384.0; // Y-axis value
AccZ = (Wire.read() << 8 | Wire.read()) / 16384.0; // Z-axis value
// Calculating Roll and Pitch from the accelerometer data
accAngleX = (atan(AccY / sqrt(pow(AccX, 2) + pow(AccZ, 2))) * 180 / PI) - 3.09; // AccErrorX ~(0.58) See the calculate_IMU_error()custom function for more details
accAngleY = (atan(-1 * AccX / sqrt(pow(AccY, 2) + pow(AccZ, 2))) * 180 / PI) - 3.9; // AccErrorY ~(-1.58)
// === Read gyroscope data === //
previousTime = currentTime; // Previous time is stored before the actual time read
currentTime = millis(); // Current time actual time read
elapsedTime = (currentTime - previousTime) / 1000; // Divide by 1000 to get seconds
Wire.beginTransmission(MPU);
Wire.write(0x43); // Gyro data first register address 0x43
Wire.endTransmission(false);
Wire.requestFrom(MPU, 6, true); // Read 4 registers total, each axis value is stored in 2 registers
GyroX = (Wire.read() << 8 | Wire.read()) / 131.0; // For a 250deg/s range we have to divide first the raw value by 131.0, according to the datasheet
GyroY = (Wire.read() << 8 | Wire.read()) / 131.0;
GyroZ = (Wire.read() << 8 | Wire.read()) / 131.0;
// Correct the outputs with the calculated error values
GyroX = GyroX + 3.1; // GyroErrorX ~(-0.56)
GyroY = GyroY - .02; // GyroErrorY ~(2)
GyroZ = GyroZ + 0.17; // GyroErrorZ ~ (-0.8)
// Currently the raw values are in degrees per seconds, deg/s, so we need to multiply by sendonds (s) to get the angle in degrees
gyroAngleX = gyroAngleX + GyroX * elapsedTime; // deg/s * s = deg
gyroAngleY = gyroAngleY + GyroY * elapsedTime;
yaw = yaw + GyroZ * elapsedTime;
// Complementary filter - combine acceleromter and gyro angle values
//roll = 0.96 * gyroAngleX + 0.04 * accAngleX;
//pitch = 0.96 * gyroAngleY + 0.04 * accAngleY;
float cfac = .04; // TEST ml
//roll = (1-cfac)* gyroAngleX + cfac * accAngleX; //TEST ml
//pitch = (1-cfac) * gyroAngleY + cfac * accAngleY; //TEST ml
roll = accAngleX;
pitch = accAngleY;
}
void calculate_IMU_error() {
// We can call this funtion in the setup section to calculate the accelerometer and gyro data error. From here we will get the error values used in the above equations printed on the Serial Monitor.
// Note that we should place the IMU flat in order to get the proper values, so that we then can the correct values
// Read accelerometer values 200 times
while (c < 200) {
Wire.beginTransmission(MPU);
Wire.write(0x3B);
Wire.endTransmission(false);
Wire.requestFrom(MPU, 6, true);
AccX = (Wire.read() << 8 | Wire.read()) / 16384.0 ;
AccY = (Wire.read() << 8 | Wire.read()) / 16384.0 ;
AccZ = (Wire.read() << 8 | Wire.read()) / 16384.0 ;
// Sum all readings
AccErrorX = AccErrorX + ((atan((AccY) / sqrt(pow((AccX), 2) + pow((AccZ), 2))) * 180 / PI));
AccErrorY = AccErrorY + ((atan(-1 * (AccX) / sqrt(pow((AccY), 2) + pow((AccZ), 2))) * 180 / PI));
c++;
}
//Divide the sum by 200 to get the error value
AccErrorX = AccErrorX / 200;
AccErrorY = AccErrorY / 200;
c = 0;
// Read gyro values 200 times
while (c < 200) {
Wire.beginTransmission(MPU);
Wire.write(0x43);
Wire.endTransmission(false);
Wire.requestFrom(MPU, 6, true);
GyroX = Wire.read() << 8 | Wire.read();
GyroY = Wire.read() << 8 | Wire.read();
GyroZ = Wire.read() << 8 | Wire.read();
// Sum all readings
GyroErrorX = GyroErrorX + (GyroX / 131.0);
GyroErrorY = GyroErrorY + (GyroY / 131.0);
GyroErrorZ = GyroErrorZ + (GyroZ / 131.0);
c++;
}
//Divide the sum by 200 to get the error value
GyroErrorX = GyroErrorX / 200;
GyroErrorY = GyroErrorY / 200;
GyroErrorZ = GyroErrorZ / 200;
// Print the error values on the Serial Monitor
Serial.print("AccErrorX: ");
Serial.println(AccErrorX);
Serial.print("AccErrorY: ");
Serial.println(AccErrorY);
Serial.print("GyroErrorX: ");
Serial.println(GyroErrorX);
Serial.print("GyroErrorY: ");
Serial.println(GyroErrorY);
Serial.print("GyroErrorZ: ");
Serial.println(GyroErrorZ);
//delay(5000);
}

Re: Kofferneigung im Fahrerhaus anzeigen
Danke hugepanic,
das ist mal ne geile Anleitung.
Hast Du noch andere LKW-taugliche Arduino Projekte? Vielleicht brauchen wir einen eigenen Arduino Fred?
Grüsse,
Max
das ist mal ne geile Anleitung.
Hast Du noch andere LKW-taugliche Arduino Projekte? Vielleicht brauchen wir einen eigenen Arduino Fred?
Grüsse,
Max
Bucher DURO 4x4 'Bruce'
-
Wilmaaa

- Forenteam
- Beiträge: 19485
- Registriert: 2006-10-02 9:50:27
- Wohnort: 35519 Rockenberg
- Kontaktdaten:
Re: Kofferneigung im Fahrerhaus anzeigen
Ich hab einen Virus: den H-A-N-O-M-A-G-I-R-U-S
-----
"Frauen haben in der Küche nichts zu suchen. Sie müssen sich um die Schweine kümmern und den Traktor schmieren." (Charlotte MacLeod)
-----
"Das ist also ein Kleinbus und ein LKW in einem." (Mitarbeiterin über den 170er)
-----
"Frauen haben in der Küche nichts zu suchen. Sie müssen sich um die Schweine kümmern und den Traktor schmieren." (Charlotte MacLeod)
-----
"Das ist also ein Kleinbus und ein LKW in einem." (Mitarbeiterin über den 170er)

Re: Kofferneigung im Fahrerhaus anzeigen
Meine Lösung als bekennender Geradesteher
Eine Libelle in Fahrerhaus, die zeigt ganz zuverlässig an, ob Links - rechts im Wasser ist.
Eine Libelle am Koffer, die zeigt vorne - hinten im Wasser an
Dazu eine Wasserwaagen App - Handy liegt im Koffereingang und dann weiß ich alles ganz genau
Eine Libelle in Fahrerhaus, die zeigt ganz zuverlässig an, ob Links - rechts im Wasser ist.
Eine Libelle am Koffer, die zeigt vorne - hinten im Wasser an
Dazu eine Wasserwaagen App - Handy liegt im Koffereingang und dann weiß ich alles ganz genau
Frank
Unserer heißt Alladin und ist ein MAN LE220 mit ausgebautem Kühlkoffer
Ausbau siehe http://www.allrad-lkw-gemeinschaft.de/p ... 35&t=55758
Wie viel Expeditionsmobil ist nötig - unsere kommende 3,5 to Lösung viewtopic.php?p=824020#p824020
Unserer heißt Alladin und ist ein MAN LE220 mit ausgebautem Kühlkoffer
Ausbau siehe http://www.allrad-lkw-gemeinschaft.de/p ... 35&t=55758
Wie viel Expeditionsmobil ist nötig - unsere kommende 3,5 to Lösung viewtopic.php?p=824020#p824020

Re: Kofferneigung im Fahrerhaus anzeigen
Hallo,
manche hängen auch ganz einfach kurz ein Lot in den Durchgang.
Habe ich gehört.
manche hängen auch ganz einfach kurz ein Lot in den Durchgang.
Habe ich gehört.
Grüße
DaPo (Daniel)
DaPo (Daniel)
Re: Kofferneigung im Fahrerhaus anzeigen
Danke Wilmaaa! Down the rabbit hole I go....Wilmaaa hat geschrieben: ↑2021-11-11 11:31:36Du meinst sowas wie den hier?
viewtopic.php?f=34&t=94325
Bucher DURO 4x4 'Bruce'
Re: Kofferneigung im Fahrerhaus anzeigen
Also Ihr Profis, es stand schon weiter oben, aber nochmal:
-Der Koffer während der Fahrt verschlossen von der Innenseite des Fahrerhauses --> ist bei mir so
-Der Koffer weiter weg, so das mein Instrumente nicht ablesen kann ---> DoKa, hab ich auch
-Der Koffer an einer anderen Stelle des (weichen!) Rahmens verschraubt, was sich dadurch zeigt, das man im Fahrerhaus NICHT die Neigung des Koffers messen kann --> ist wohl bei fast jedem hier so
Da wirds dann halt eng mit mechanischen Lösungen...
Ich hab in meiner Karre zwei von den 2-achs libellen. Eine im Fahrerhaus und eine im Koffer. Das klappt super! Ich stell die Karre nach der Vorderen Libelle ab grade, und kann den Fehler dann hinten ablesen!
Ist das alles ein Problem?? NEIN, trotzdem.....
Für mich war das jetzt zusammengerechnet ein abend bastelei und das ding läuft. Kosten bei mir: unter 10€! der sensor lag in der kiste und der Arduino mit display und stromversorgung ist direkt am Armaturenbrett verbaut!
Währe mir eine mechanische lösung lieber? Wahrscheinlich JA, die gibts aber nicht unter diesen umständen, oder ist hier noch nicht aufgetaucht.
Update zu meiner Lösung:
Ich hab festgestellt das der Sensor wohl noch falsch montiert ist. Wenn der Motor läuft vibriert der Sensor und die Anzeige eiert um 0.x° hin und her. Muß ich mir mal überlegen ob ich das mit Hard- oder Software repariere...oder ob das überhaupt relevant ist.
Vielleicht so wie früher: 3 lagen doppel-seitiges Klebeband unter den Sensor und fertig.
Es gibt Fahrzeuge, bei denen ist und/oder
-Der Koffer während der Fahrt verschlossen von der Innenseite des Fahrerhauses --> ist bei mir so
-Der Koffer weiter weg, so das mein Instrumente nicht ablesen kann ---> DoKa, hab ich auch
-Der Koffer an einer anderen Stelle des (weichen!) Rahmens verschraubt, was sich dadurch zeigt, das man im Fahrerhaus NICHT die Neigung des Koffers messen kann --> ist wohl bei fast jedem hier so
Da wirds dann halt eng mit mechanischen Lösungen...
Ich hab in meiner Karre zwei von den 2-achs libellen. Eine im Fahrerhaus und eine im Koffer. Das klappt super! Ich stell die Karre nach der Vorderen Libelle ab grade, und kann den Fehler dann hinten ablesen!
Ist das alles ein Problem?? NEIN, trotzdem.....
Für mich war das jetzt zusammengerechnet ein abend bastelei und das ding läuft. Kosten bei mir: unter 10€! der sensor lag in der kiste und der Arduino mit display und stromversorgung ist direkt am Armaturenbrett verbaut!
Währe mir eine mechanische lösung lieber? Wahrscheinlich JA, die gibts aber nicht unter diesen umständen, oder ist hier noch nicht aufgetaucht.
Update zu meiner Lösung:
Ich hab festgestellt das der Sensor wohl noch falsch montiert ist. Wenn der Motor läuft vibriert der Sensor und die Anzeige eiert um 0.x° hin und her. Muß ich mir mal überlegen ob ich das mit Hard- oder Software repariere...oder ob das überhaupt relevant ist.
Vielleicht so wie früher: 3 lagen doppel-seitiges Klebeband unter den Sensor und fertig.
-
cruise-the-planet
- Schlammschipper
- Beiträge: 498
- Registriert: 2018-03-01 17:36:02
Re: Kofferneigung im Fahrerhaus anzeigen
Wie hast du denn den Sensor wasserdicht verpackt? Gibts da auch noch Gehäuse dazu? Oder liegt der Sensor im geschützten Koffer drin?
Und der Arduino selbst mit dem Display, ist der auch in einem Gehäuse?
LG
Lukas
Und der Arduino selbst mit dem Display, ist der auch in einem Gehäuse?
LG
Lukas
Re: Kofferneigung im Fahrerhaus anzeigen
Der Sensor und der Arduino sitzen beide in einem gedruckten ABS-Gehäuse. Das gehäuse vom Tempomaten/Arduino im foto ist noch ein "vorserien" produkt. Das hab ich nochmal neu gemacht damit's nicht ganz so scheiße aussieht.
Wasserdicht ist da nix, weil beides im Innenraum verbaut ist.
Ich seh grad, ich muß den Fred vom tempomaten mal updaten mit dem aktuellen status und ein paar Bildern.
Am Tempomat ist übrigens ein "wasserdichter" sensor an der Kardanwelle verbaut! Der ist professionell mit Heißkleber zugeklebt, so das da hoffentlich nix passiert. Einbaulage ist aber so das nix in die öffnung reinfließen sollte.
mal sehen, das ding ist seit über einem Jahr verbaut, und bis jetzt zuverlässig.
Wasserdicht ist da nix, weil beides im Innenraum verbaut ist.
Ich seh grad, ich muß den Fred vom tempomaten mal updaten mit dem aktuellen status und ein paar Bildern.
Am Tempomat ist übrigens ein "wasserdichter" sensor an der Kardanwelle verbaut! Der ist professionell mit Heißkleber zugeklebt, so das da hoffentlich nix passiert. Einbaulage ist aber so das nix in die öffnung reinfließen sollte.
mal sehen, das ding ist seit über einem Jahr verbaut, und bis jetzt zuverlässig.
- Dateianhänge
-
-
-
buntbaer2001

- süchtig
- Beiträge: 783
- Registriert: 2019-02-08 16:49:18
- Wohnort: Oberpfalz, LKr SAD
Re: Kofferneigung im Fahrerhaus anzeigen
Nö, kannte ich nicht. Danke dafür.w3llschmidt hat geschrieben: ↑2021-11-08 13:03:12Kennt ihr?
https://github.com/spitzlbergerj/CaravanPi
Wenn hier jemand eine Platinenbestellung bei JLCPCB organisiert bin ich dabei. SMD löten ist mit meinen Augen und zittrigen Händen nicht so das meine...
Bin ja immer zu haben für so Technikspielereien, daher auch nochmal mein Dank an hugepanic.
Grüße, Peter
Ausbau und mehr unter https://www.gietl.earth
They promised me Mars colonies. Instead I got Facebook. (Buzz Aldrin)
They promised me Mars colonies. Instead I got Facebook. (Buzz Aldrin)
Re: Kofferneigung im Fahrerhaus anzeigen
Bin Immer wieder positiv erstaunt darüber, wie elektroaffine Bastler aus verschiedenen Disziplinen kleine Helferlein zusammenwürfeln können ! 


Grüße Carsten
Plan: abgel.3,5t_containierbar_Schaltgetriebe_HA-Sperre_Leiterrahmen_Hubdach-Koffer_GKat-LPG (nice to have: gr.U-Plakette_Oldtimer_AU-frei_Kammer-Diesel_4x4_Frontlenker) und a weng autark-isch ;)
Plan: abgel.3,5t_containierbar_Schaltgetriebe_HA-Sperre_Leiterrahmen_Hubdach-Koffer_GKat-LPG (nice to have: gr.U-Plakette_Oldtimer_AU-frei_Kammer-Diesel_4x4_Frontlenker) und a weng autark-isch ;)